磁定位感测器可为工业和汽车BLDC马达控制系统设计人员提供小型、稳健且易于组装的定位检测解决方案。诸如ADI ADA4571等测角感测器能够提供高速、高准确度、经生产测试保证的全测角准确度、整合式诊断功能以及低功耗作业模式,不仅确保元件的安装和校准设置简便,同时也减少了使用者的软体开销。近年来,许多终端市场和应用的一个明显趋势是用高效率的无刷直流马达(BLDC)取代交流(AC)马达或机械泵。使用BLDC马达的一些主要优点包括:更高的功率和热效率、更佳的空间/重量效率、更高的可靠性(无刷),以及在危险环境下操作更安全(不会像有刷马达一样产生刷粉或火花)。此外,由于BLDC马达采用电子换向方式,因此更易于在应用的速度范围内控制扭矩和速度参数,并且能够实现更复杂的控制,例如持续保持扭矩或速度极限。凭藉这些优点,BLDC马达在众多现有和新应用中占得了一席之地。在汽车领域,BLDC马达已用于取代液压执动器和有刷马达,这不仅能够减少重量/尺寸、延长工作寿命、降低维护成本,而且能够大幅提高整体系统性能和效率。随着汽车产业朝向最佳化燃油效率发展,BLDC马达现在能够实现相应的性能,从而有助于为动力传动系统、动力转向和HVAC系统以及启动马达/发电机和各类泵(水/燃料/油)减轻负载。磁角感测器在BLDC马达控制的作用要实现马达的精确控制和高效率转向,高解析度电流和旋转位置资讯至关重要。 一般而言,在基于旋变器的系统中,解析度和准确度可能非常高,但终端解决方案可能价格昂贵且体积较大,这是因为旋变器本身会占用较大的实体空间。无感测器方案也可用于检测反电动势(EMF)电流,而且还能降低感测器重量和成本,但是马达启动性能可能出现问题,因为这时不会产生反电动势,也就无法得到可用的位置资料。 其他解决方案,例如利用三个霍尔效应感测器检测马达磁体位置,通常用于对成本敏感的应用中。在这种情况下,可以达到所要求的解析度,但必须监控三种讯号。此外,这些感测器不是配套的,可能会产生空间和安装等难题。一种替代方案是使用基于异向磁阻(AMR)技术的磁角感测器,这些感测器既便宜又精确。藉由ARM感测器,不仅可实现较高的测角准确度,而且可将单一检测元件和电子电路整合在同一封装中。这可获得非常小的感测器子系统,并且能够在马达组装中定位感测器。ADI与MR技术业者Sensitec展开合作,共同提供整合高准确度AMR感测器和高性能仪表放大器于单一封装的ADA4571元件。ADA4571可在-40℃至+150℃的宽广作业温度范围进行的生产测试取得0.5°的最大角度误差,而且具有内建诊断功能、大输出电平、EMC保护以及低偏置漂移,因而成为可实现高性能BLDC马达控制且速度超过25000 RPM的理想感测器。AMR技术基于AMR理念的感测器是一种材料电阻率取决于磁化方向(相对于电流方向)的元件。 该感测器通常沉积为薄膜透磁合金(磁性铁镍合金)。AMR感测器在磁饱和状态下作业,因此外部磁场对电阻变化具有决定作用。当外部磁场和电流方向平行时的电阻最大,施加磁场与载流透过磁合金的平面垂直时电阻最小。AMR感测器如何运作的简化图如图1所示。

图1:AMR工作原理 将两个独立的惠斯登电桥(Wheatstone bridge)配置以彼此呈45°的方式排列时,可实现角度感测器,其正弦和余弦输出取决于外部磁场方向。此配置提供了具有180°绝对测量范围的感测器。
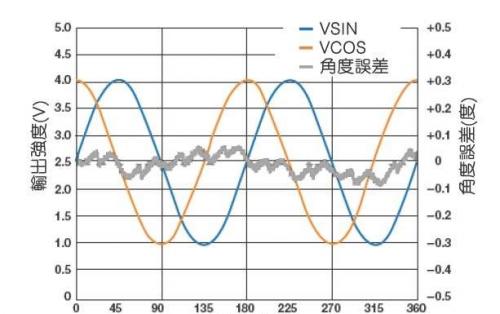
图2:360°机械旋转时的ADA4571误差(灰色)和输出波形(橙色/蓝色) 图2显示旋转磁场施加在360°机械旋转时,ADA4571的典型高输出电平和角度误差。 在微控制器中进行偏置校正和反正切计算之后,典型误差小于0.1°。感测器安装对于大部份BLDC控制系统,根据可用空间和马达轴安装的便利性,配置和安装感测器有许多选择方式。图3显示ADA4571的两种配置示例。

图3:BLDC系统与ADA4571 (a)轴端系统(b)轴侧系统 典型的轴端配置包括一个安装在旋转轴上的直径磁化碟式磁体,该磁体安装在马达组装内部,如图3(a)所示。该磁体可提供一个穿过感测器平面的磁场。在此配置中,无需使机械和电子元件接触即可直接读取转子角度。由于AMR技术不依赖磁场强度,因而能够耐受气隙变化。不依赖磁场强度还可增大机械容差,简化磁体材料的选择。紧密的轴端配置意味着感测器可直接安装在非常靠近电子控制装置(微控制器、MOSFET)的印刷电路板(PCB)上,从而能最大限度减少讯号绕线以及接近恶劣的马达环境。另一种可能的配置是图3(b)所示的轴侧系统。轴侧配置可用于待检测轴无法端接磁体的应用。在此配置中,由磁极环提供激励,感测器和磁极环可安装在轴上的任意位置。典型的应用包括电力转向泵或由于空间限制无法使用轴端的BLDC马达。采用像ADA4571一类的测角感测器,能够提供低延迟和精确的位置回馈资讯,对于马达各相的电流进行精确控制,从而使马达对动态负载做出顺畅回应,或在变化的情况下维持恒定速度。最终结果就是更妥善的控制、最大的扭矩、更高的启动/停止效率,以及更佳的运作状况。感测器设置和校准要获得更高的准确度,可在用户的生产线末端执行各类校准程式。可执行一次性偏置校准,以消除正弦和余弦讯号的初始偏置。图4显示在室温下执行一次性偏置校准后的典型性能。
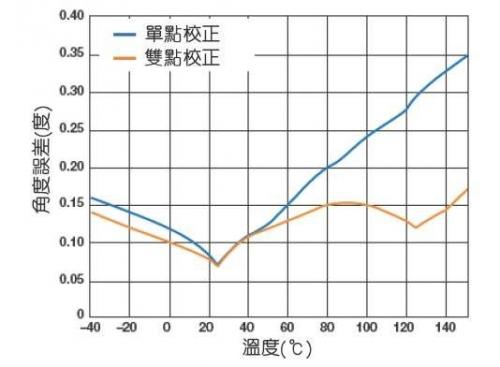
图4:在进行单点和双点校正时,典型角度误差与温度的关系 由于感测器的偏置漂移,测角准确度可能随温度升高而降低,如在150°C时进行单点校正的情况,而双点温度校准则可提高性能。在这种情况下,可对偏置和晶片温度感测器的资讯进行插值计算,并且可补偿随温度变化的偏置。自由执行应用中的BLDC系统可充份利用连续的偏置校正技术,其方法是计算指定时间内感测器输出的平均值。微控制器中的动态偏置补偿可在整个温度范围和工作寿命内实现非常高的准确度。相较于其他感测器技术(霍尔/GMR/TMR)不同,ADA4571测角感测器无需执行额外的校准步骤,例如振幅校正或正交校正。经过生产测试验证的振幅不匹配可小于1%,而先进的感测器设计还可确保正交。感测器还可忽略迟滞,从而获得高可靠度且精确的位置资讯。对于无需高准确度、性能较低的低成本应用,ADA4571可在不进行线路终端补偿校正的情况下使用。在这种情况下,ADA4571可确保具有小于5°的角度误差。这对于一些未校准的应用非常有用,因为主控制器知道轴位置,因此可最佳化启动状况。结论磁定位感测器可为工业和汽车BLDC马达控制系统设计人员提供小型、稳健且易于组装的定位检测解决方案。诸如ADI ADA4571等测角感测器能够提供高速、高准确度、经生产测试保证的全测角准确度、整合式诊断功能以及低功耗作业模式,不仅确保元件的安装和校准设置简便,同时也减少了使用者的软体开销。BLDC马达制造商可望从非常精确的位置资料中受益,即使在高速应用中也可获得非常高的扭矩性能,此外,还能够获得使用无接触式磁性检测技术的所有好处。